Dealing with Errors in C++
Sometimes, when making own C++ nodes, you’ll want to express that some kind of error happened and stop downstream nodes from the evaluation. For example, a sensor failed to initialize or there is no network connection to perform a request. Or you’ll want to create nodes that catch errors to allow some kind of recovery. Take a look at errors concept guide for a more detailed explanation.
In this article, we’ll learn the C++ API to deal with errors in XOD.
The task #
We’re going to reimplement from scratch two essential nodes that catch and raise errors — xode/core/pulse-on-error and xod/core/error.
Catching errors #
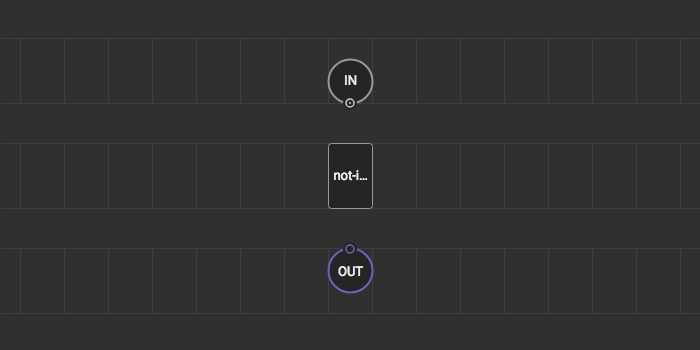
Just like pulse-on-error, our catcher should have a generic input and a pulse output. The input will be checked for upstream errors, and if there is one, a pulse will be emitted from the output.
As always, when you make a C++ node, start with a new patch, add required terminals, and the not-implemented-in-xod node.
C++ implementation is quite brief:
#pragma XOD error_catch enable
node {
void evaluate(Context ctx) {
if (getError<input_IN>(ctx)) {
emitValue<output_OUT>(ctx, 1);
}
}
}
The #pragma XOD error_catch enable directive declares that our node catches errors. Without it, the node will refuse to evaluate if it inherits an error propagated from an upstream node.
Error checking is performed with getError<input_IN>(ctx). It returns true if the pin has an upstream error, and false otherwise.
Raising errors #
Our error node clone should have generic IN and OUT pins and a boolean ERR input.
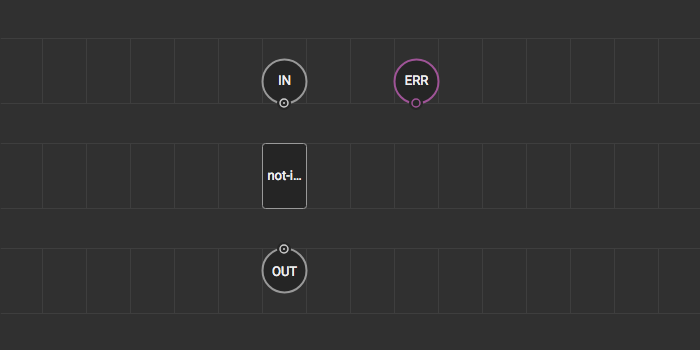
If ERR is false, a value from IN will be passed through. If ERR is true, an error will be raised from the OUT pin.
#pragma XOD error_raise enable
node {
void evaluate(Context ctx) {
if (getValue<input_ERR>(ctx)) {
raiseError<output_OUT>(ctx);
} else {
emitValue<output_OUT>(ctx, getValue<input_IN>(ctx));
}
}
}
The #pragma XOD error_raise enable declares that our node raises errors. If it is omitted XOD transpiler looks whether you use the raiseError function somewhere in the node implementation and automatically enables the feature if it is found. So in this particular case, the directive might be omitted. Using it explicitly makes the intent clear though.
Errors can be raised for an individual pin with raiseError<output_OUT>(ctx) or for all output pins at once with raiseError(ctx).
error(pulse).