Matching Ranges
If you have finished 109-thermometer, you have noticed that the thermometer node outputs the temperature value to the Tc pin in degrees Celsius.
The practical task is to make the servo rotate smoothly from 0 to 90°, reflecting a temperature change from 20 °C to 50 °C.
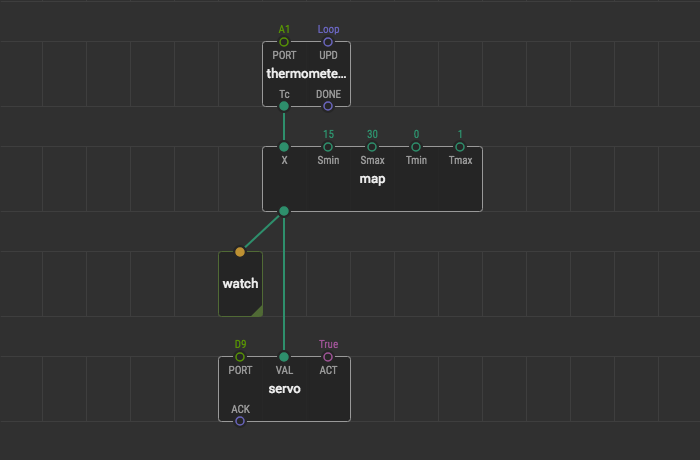
The servo node can work only with values ranging from 0 to 1. You can match the ranges using a few math nodes, but XOD gives a special node for such cases. This node is called map.
Exercise #
Make a device which shows the temperature with an arrow glued to the servo shaft.
-
Connect a TMP36 thermometer to the board as shown on the scheme.
-
Link the
Tcpin to theXpin on themapnode. -
Define the input range: open the Inspector for
map, and then setSminto 20 andSmaxto 50. -
Define the output range: set the
Tminto 0 andTmaxto 0.5 (which corresponds to ~90°). -
Link the
Xmoutput to theVALservo input.
Try to heat the thermometer with a hot object (e.g., a paper knife heated with a lighter). At the temperature of 35 °C (half the input range), the servo should rotate to 45°, which is the midpoint of the output range.
Clipping ranges #
The map node will now linearly map the 20–50 °C range to 0–90°. Let’s raise the sensitivity. Say, we want to map 15–30 °C to 0–90° rotation.
What happens if the X pin of the map receives data that is outside the input range (10 or 42, for example)? The output value which is the servo angle proportionally falls outside the desired range too.
For such cases, there is a sibling node called map-clip. It works the same way, but any input that is out of the range rounds to the nearest limit. Thus, if X receives the value of 10, the map-clip node accepts it as 15, and 42 as 30.
Extra exercise #
Replace the map node with map-clip and try the out-of-range values.
Replace the thermometer with analog-sensor for LDR and play with values.
Draw a gauge on the paper and attach it to the servo.