Manipulator
Controlling the servo with a potentiometer or another analog sensor is easy. However, what if we want to make some complex movements with servos?
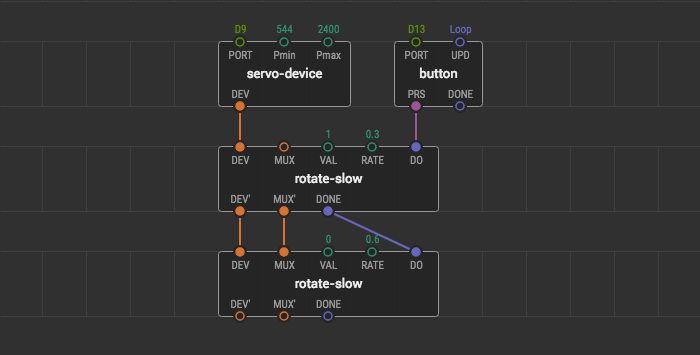
On the patch board, you see servo-device. This node defines a servo for the further usage: the port, minimum, and maximum pulse widths which correspond to the operating limits of the servo.
The servo-device node links to nodes that work with servos: rotate-slow in this example. The rotate-slow node rotates the servo to the angle specified in VAL with the RATE speed when a DO pulse is received. You may chain these nodes to make a sequential movement.
You may notice that rotate-slow have MUX pins. It’s another custom type called mutex that allows only one node to act at the same time.
This program rotates the servo to the maximum angle slowly and then turn it back twice as fast on a button press. The button is ignored until rotation completes.
Upload the program and check it out.
Circuit #
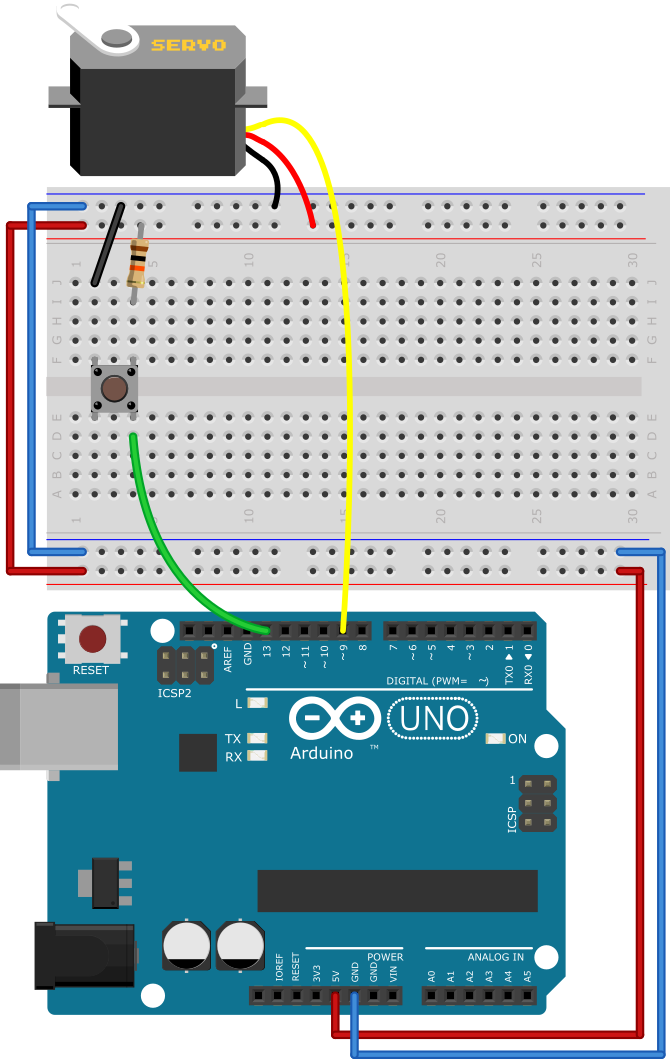
↓ Download as a Fritzing project
Exercise #
Let’s change the servo trajectory.
- Add two more
rotate-slownodes. - Link all nodes in the same way.
- Adjust pin values of
rotate-slow. - Upload the program.
Press the button and see how the servo fulfills your order.
👆 Simple nodes vs device nodes #
The xod-dev/servo library also contains a rotate node. The main difference between it and rotate-slow that it rotates the servo immediately ignoring MUX.
And if you wonder how the simple servo node used in the previous chapter works: under the hood, it is a trivial composition of servo-device and rotate with a few terminals exposed to you. Simple nodes (also known as quickstart nodes) are enough for basic applications and when you need more, you use raw device nodes along with action nodes like you do in this chapter.
This idiom is applicable to other hardware as well.